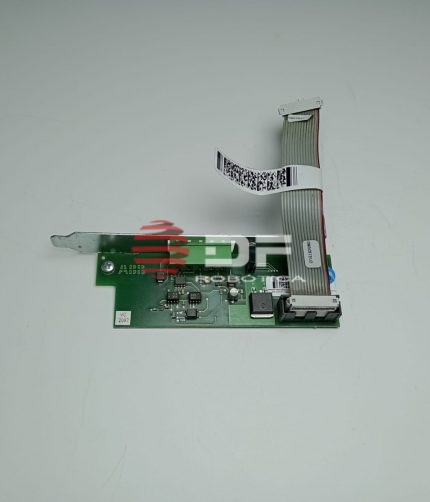
Cabo de alimentação e comunicação de 17 vias utilizado na TPU S4C (3HNE 00313-1) para comunicação entre terminal de programação e painel.
======================
PARA MAIS INFORMAÇÕES, ENTRE EM CONTATO:
Whatsapp: (11) 9.8188-9006
Escritório: (11) 4565-9020
E-MAIL: contato@dfrobotica.com
SITE: www.DFROBOTICA.com
Cabo de TPU S4C 7M
Produto anterior

MINIVENTILADOR IRC5 120x40
Sob consulta
Próximo produto

Chave Manual/Automático
Sob consulta
Descrição
Cabo de alimentação e comunicação de 17 vias utilizado na TPU S4C (3HNE 00313-1) para comunicação entre terminal de programação e painel.
======================
PARA MAIS INFORMAÇÕES, ENTRE EM CONTATO:
Whatsapp: (11) 9.8188-9006
Solicitar Orçamento
Descrição
Produtos Relacionados