")
")
")
")






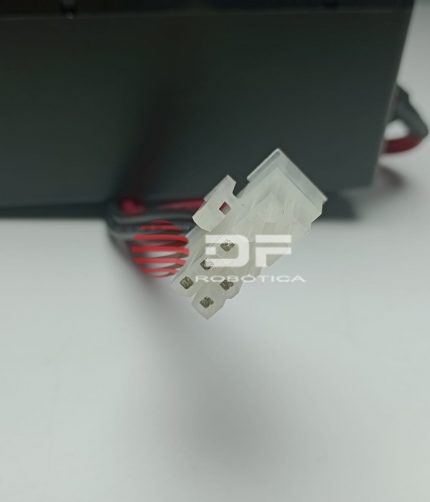
Punho de reposição utilizado nos robôs IRB 16000ID.
======================
PARA MAIS INFORMAÇÕES, ENTRE EM CONTATO:
Whatsapp: (11) 9.8188-9006
Escritório: (11) 4565-9020
E-MAIL: contato@dfrobotica.com
SITE: www.DFROBOTICA.com
Punho IRB 1600ID
Produto anterior

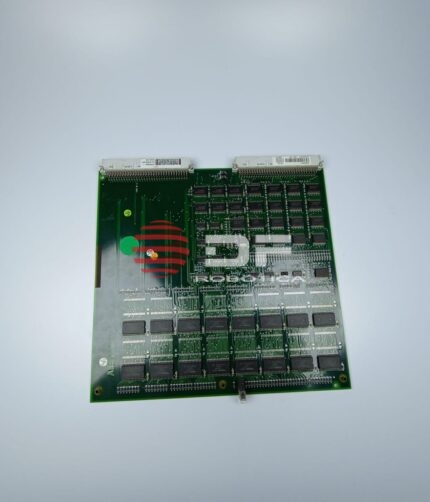
PLACA DE I/O
Sob consulta
Próximo produto

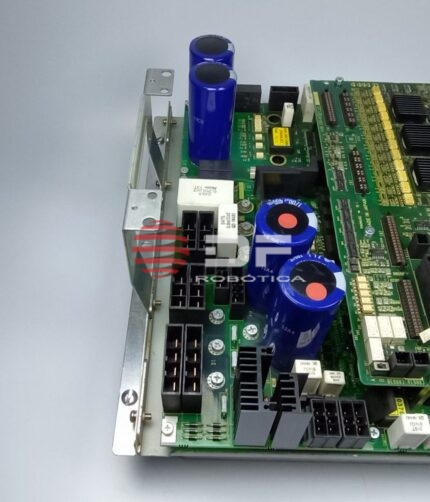
ULTRACAP - DSQC 655 | 3HAC025562-001
Sob consulta
Descrição
Punho de reposição utilizado nos robôs IRB 16000ID.
======================
PARA MAIS INFORMAÇÕES, ENTRE EM CONTATO:
Whatsapp: (11) 9.8188-9006
Solicitar Orçamento
Descrição
Produtos Relacionados